|
孫君曼1,謝澤會1,李莉萍2,馮廣軍1
(1.鄭州輕工業學院電氣信息工程學院,河南鄭州450002;2.開封空分設備集團公司,河南開封475000)
摘要:在MATLAB/SIMULINK平臺上,通過實驗的方法建立了模糊自適應PID系統的仿真模型,給出了模糊自適應PID仿真的具體實現方法,并進行生物質鍋爐控制子系統仿真應用研究,通過常規PID控制算法與模糊自適應PID控制算法對干擾信號的反應過程仿真結果對比,表明了模糊PID控制策略使系統具有強抗干擾性、靈活性和適應性強的優點,又具有控制精度高的優勢。
0前言
生物質能是指通過光合作用把太陽能轉化為化學能后固定和儲存在生物體內的能量,生物質能源是一種理想的可再生清潔能源,來源廣泛每年都有大量的工業農業及森林廢棄物產出,工業鍋爐是煤炭消費大戶是環境的重要污染源,發展生物質鍋爐技術提高綠色可再生能源利用對促進我國節約型社會主義建設具有重要意義。
使用廢棄生物質壓縮成型的顆粒燃料的鍋爐,替代燃煤燃油鍋爐,因其使用清潔能源,具有節約能源、CO2溫室氣體零排放、環保性好符合國家能源發展戰略而得到迅速發展,但因其生物質燃料的特點給鍋爐的控制系統帶來新問題。
在生物質鍋爐控制系統中,由于生物質燃料濕度、密度、種類及鍋爐負荷變化等干擾因素不確定性,以及時變性、非線性等因素,考慮將先進控制策略和傳統PID控制相結合的方案,進行生物質鍋爐控制系統研究。模糊控制器不要求確定受控對象的精確數學模型,而根據控制規則組織控制決策表,由控制決策表決定控制量的大小。這種將模糊控制器和傳統PID控制相結合的控制策略,使系統具有模糊控制的靈活性和適應性強的優點,又具有PID控制精度高的優勢。尤其適合于在具有干擾因素不確定性的生物質鍋爐的控制系統中進行應用。
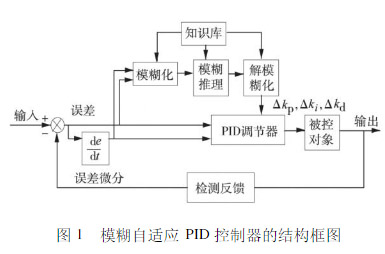
1模糊自適應PID控制器的構成
控制系統的核心部分是模糊控制器,包括模糊化、知識庫、模糊推理、解模糊化和輸入輸出量化等部分。模糊化環節把輸入的精確量轉化為模糊量,輸入信號映射到相應論域上的一個點后,將其轉化為該論域上的一個模糊子集;知識庫中包含了生物質鍋爐應用領域中的經驗知識和要求的目標,通常由數據庫和模糊規則庫兩部分組成,數據庫主要包括各語言變量的隸屬度函數,尺度變換因子和模糊空間的分級數等,規則庫包括了用模糊語言變量表示的一系列控制規則,它們反映了控制專家的經驗和知識;模糊推理是模糊控制器的核心,是基于模糊邏輯中的蘊含關系及推理規則來進行的;解模糊化是將模糊推理得到的控制量(模糊量)變換為實際可用于控制的精確量,它包括兩部分內容:(1)是將模糊的控制量經解模糊變換變成表示在論域范圍的精確量;(2)是將表示在論域范圍的精確量經量程轉換變成實際的控制量。
模糊自適應PID控制器是由可調整PID控制器和模糊控制器構成,在常規PID控制的基礎上,以誤差E和誤差變化率Ec作為輸入,通過模糊推理輸出Kp,Ki,Kd的調整值,以實現在線整定,滿足不同的E和Ec對PID參數Kp、Ki和Kd的要求,而使被控對象具有良好的動、靜態性能。
2模糊自適應PID控制器的實現
2.1模糊自適應控制算法研究
首先確定模糊控制器的維數,根據實際需要確定各個輸入、輸出變量的變化范圍,然后確定它們的量化等級、量化因子、比例因子;在每個變量的量化論域內定義模糊子集;確定模糊子集個數及每個模糊子集的語言變量,為各語言變量選擇隸屬度函數;確定模糊控制規則的原則是保證控制器的輸出能夠使系統輸出響應的動靜態性能達到最佳;編制模糊控制表,根據模糊控制規則和確定的輸入、輸出變量求出模糊控制器的輸出。這些輸出值是PID參數的調整量,把它們與輸入量在1個表中按一定關系列出就構成了模糊控制表。PID3個參數一般是獨立調整,所以有3個模糊控制表;把采樣得到的偏差、偏差變化率經過整理后,代入模糊控制規則表,得出新的PID參數,再經過PID算法的計算就得出了最后的輸出量,也就是系統的控制量;根據仿真效果或實驗結果分析模糊PID的控制性能,再對量化因子和比例因子進行調整以達到理想的控制效果。

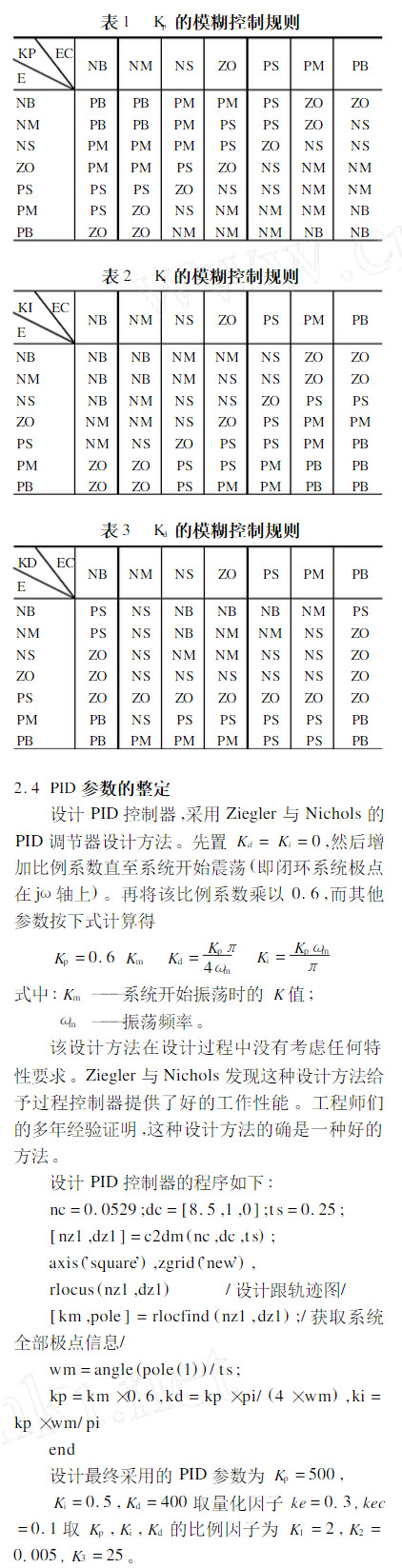
2.3建立模糊控制規則表
參數的整定規則是模糊控制的核心,依據專家的經驗建立模糊控制規則,本設計采用49條模糊語言規則。
3仿真研究
在Matlab/simulink環境下構建模型,整個模塊圖由模糊控制器、PID控制模塊、控制對象及輸入輸出等組成。使用的模塊主要有Simu-link(基本庫)、Simulink Extras(擴展庫)和Fuzzy logic toolbox(模糊邏輯庫)。
3.1模糊控制器的編輯
在MATLAB命令窗口輸入fuzzy命令打開模糊編輯窗口,建立模糊控制器。在matlab命令窗口輸入plotfis(a)觀察模糊控制系統的構成,如圖7所示。
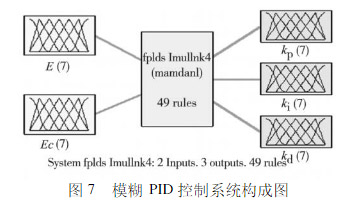
分別輸入E,Ec,Kp,Ki,Kd的隸屬函數及模糊規則,取and method為min,or method為max,implication(推理)為min,aggregation(合成)為max,取defuzzification(去模糊化方法)為centroid(加權平均法)。建好模糊控制系統后,以“fpidsimulink.fis”存盤。在仿真的時候將其加載到工作空間中,即可在simulink環境中對模糊控制器進行仿真。
3.2模糊自適應PID控制的仿真
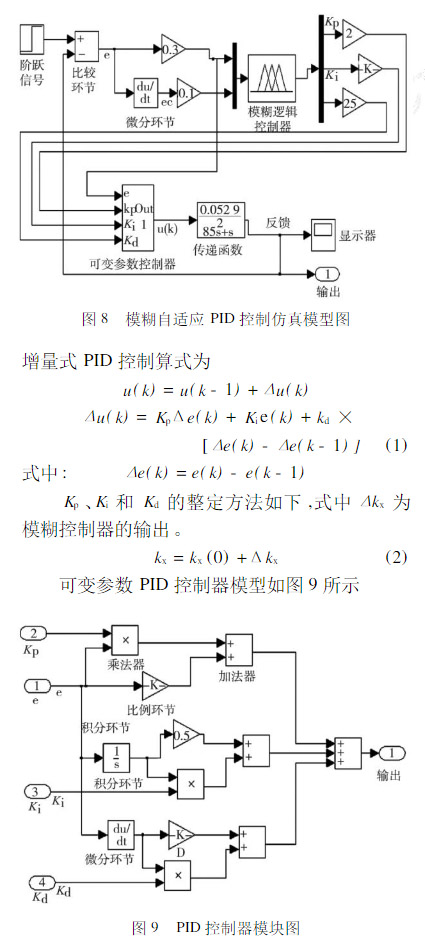
目前,中型生物質蒸汽鍋爐控制回路包括汽包水位控制、爐排控制、鼓風控制、引風控制、用于發電鍋爐還需要主蒸汽溫度等回路。選取某供汽量為120t/h的鍋爐汽包為被控對象,其給水流量與水位的傳遞函數為:G(s)=0.0529/8.5s2+s。
4仿真結果分析
分別對模糊PID控制進行階躍響應仿真,并將仿真結果與PID仿真進行對比。仿真時間為20s,在15s處加周期為15s,占空比為5%,幅度為10的脈沖信號,研究模糊PID對干擾的抑制能力。其仿真結果分別如下圖所示。
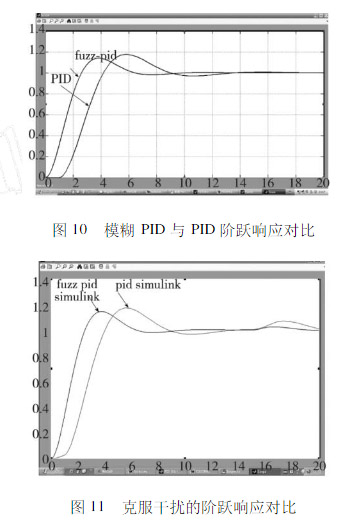
可以看出,模糊自適應PID控制器的響應速度更快,超調量比PID控制器要小,振蕩時間更短,很快的趨于穩定狀態,顯示出良好的動態性能和穩定精度。同時從加干擾后的仿真圖中可以看出來模糊PID控制器對干擾有很好的抑制能力。 |